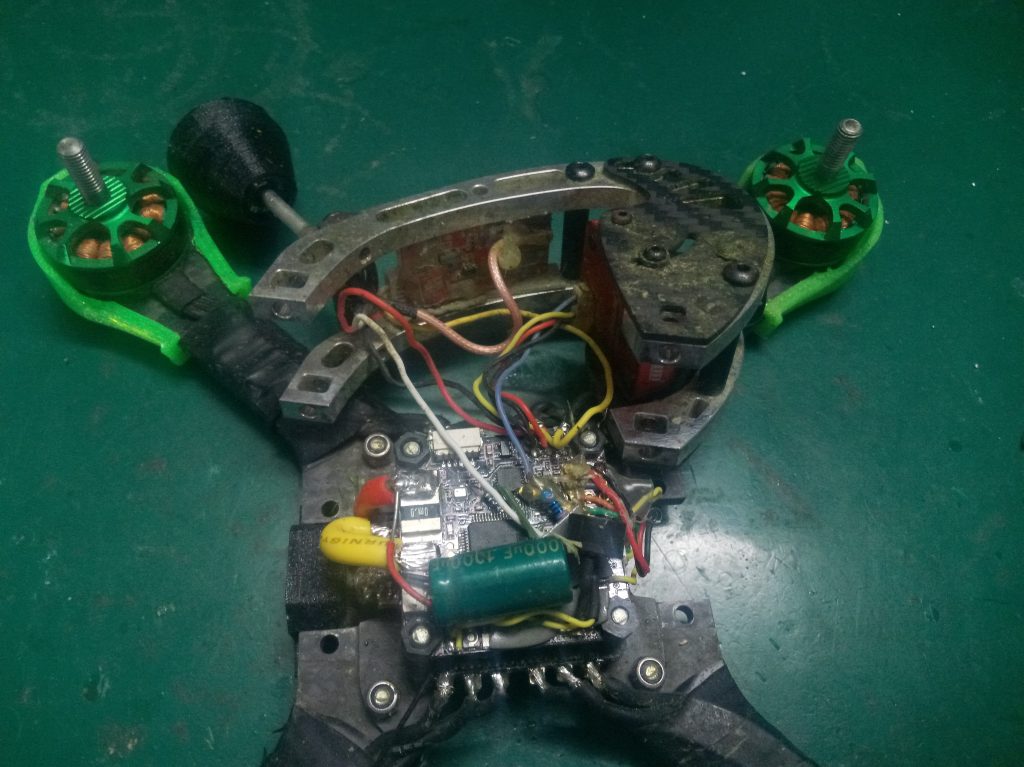
After changing flight controller because of USB i wanted to start the setup, so i connected copter via USB –> “NO SERIAL APPEARED”
I got really salty because that’s was the only reason why i changed the omnibus. But question was still why, took a look into the linux kernel log. (enter dmesg in console):
[316073.353128] usb 8-2.4.3: device not accepting address 56, error -71
[316073.537119] usb 8-2.4.3: new full-speed USB device number 57 using uhci_hcd
[316073.957079] usb 8-2.4.3: device not accepting address 57, error -71
[316073.958253] usb 8-2.4-port3: unable to enumerate USB device
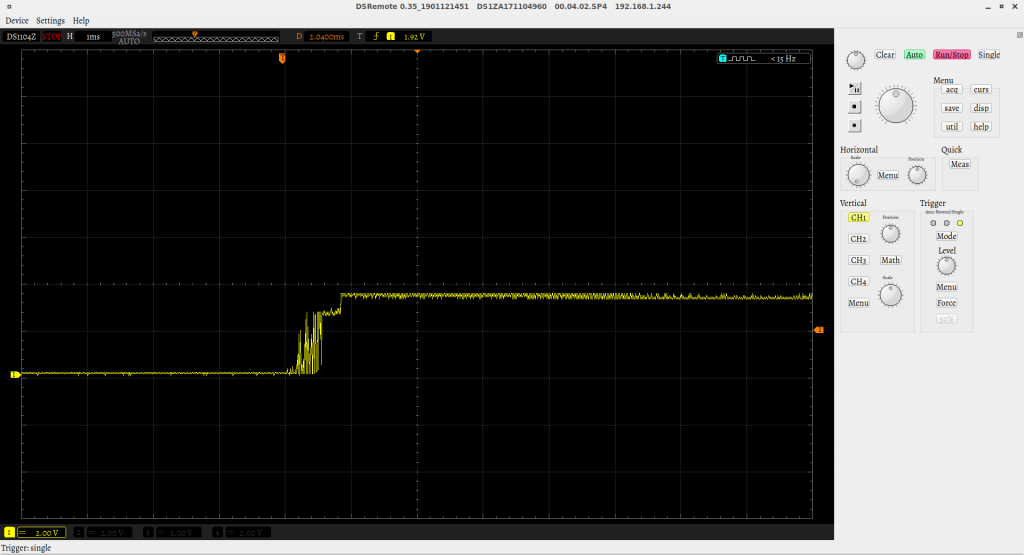
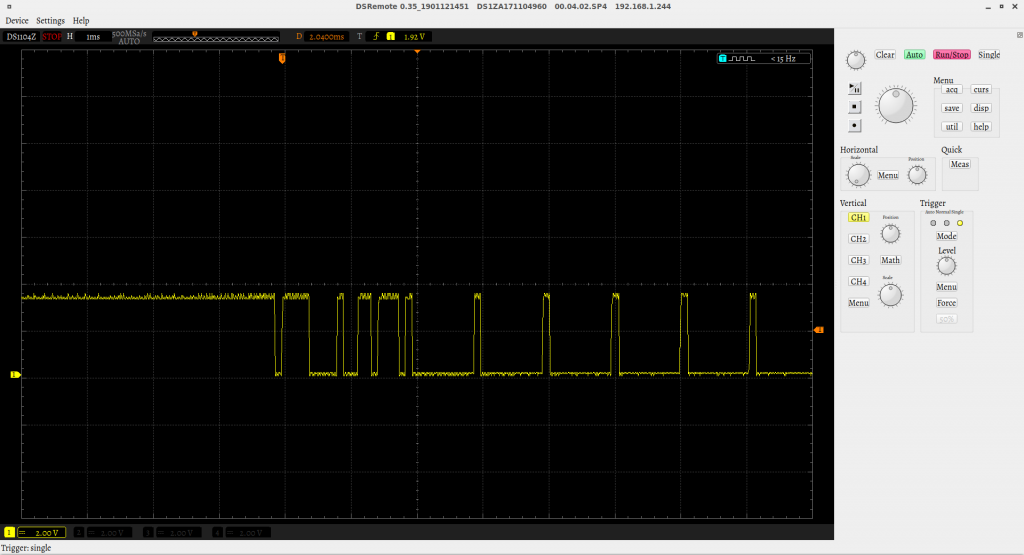
Found only waste to error Code -71. Nothing useful at all in the whole internet )=. If you have something for me please post it! Only after connecting several times serial appeared very rare, tried a standalone onmibus without anything else connected which was lying around:
[316781.674161] usb 8-2.4.3: new full-speed USB device number 58 using uhci_hcd
[316781.933188] usb 8-2.4.3: New USB device found, idVendor=0483, idProduct=5740
[316781.933191] usb 8-2.4.3: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[316781.933193] usb 8-2.4.3: Product: OmnibusF4
[316781.933195] usb 8-2.4.3: Manufacturer: Betaflight
[316781.933197] usb 8-2.4.3: SerialNumber: 0x8000000
[316781.937288] cdc_acm 8-2.4.3:1.0: ttyACM1: USB ACM device
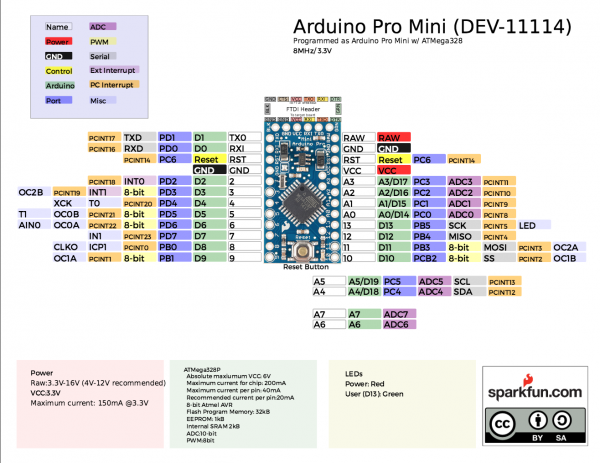
worked at first try, so i assumed they forget the pull up resistor on D+ for detecting the USB Device, what for example happened on the blue pill (stm32 based arduino board)
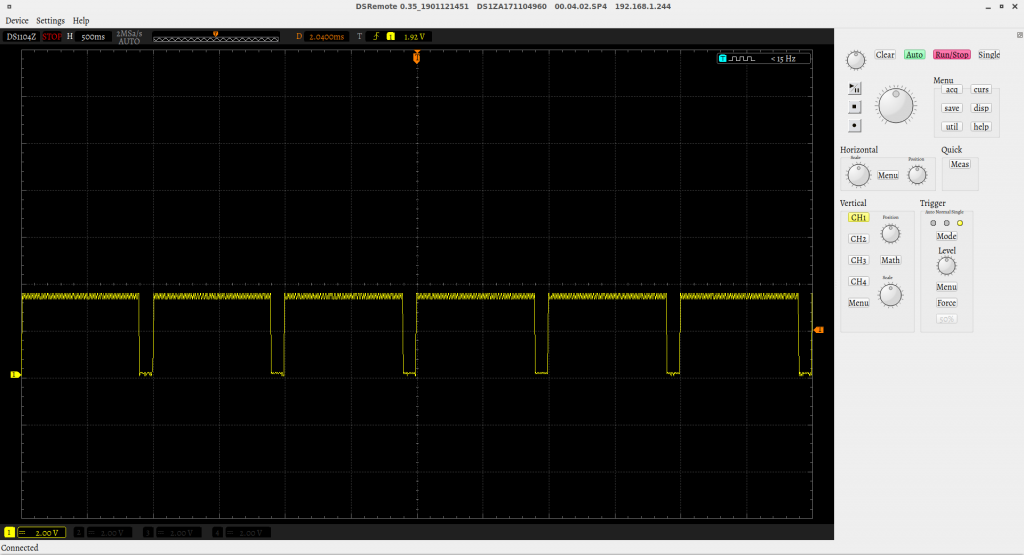
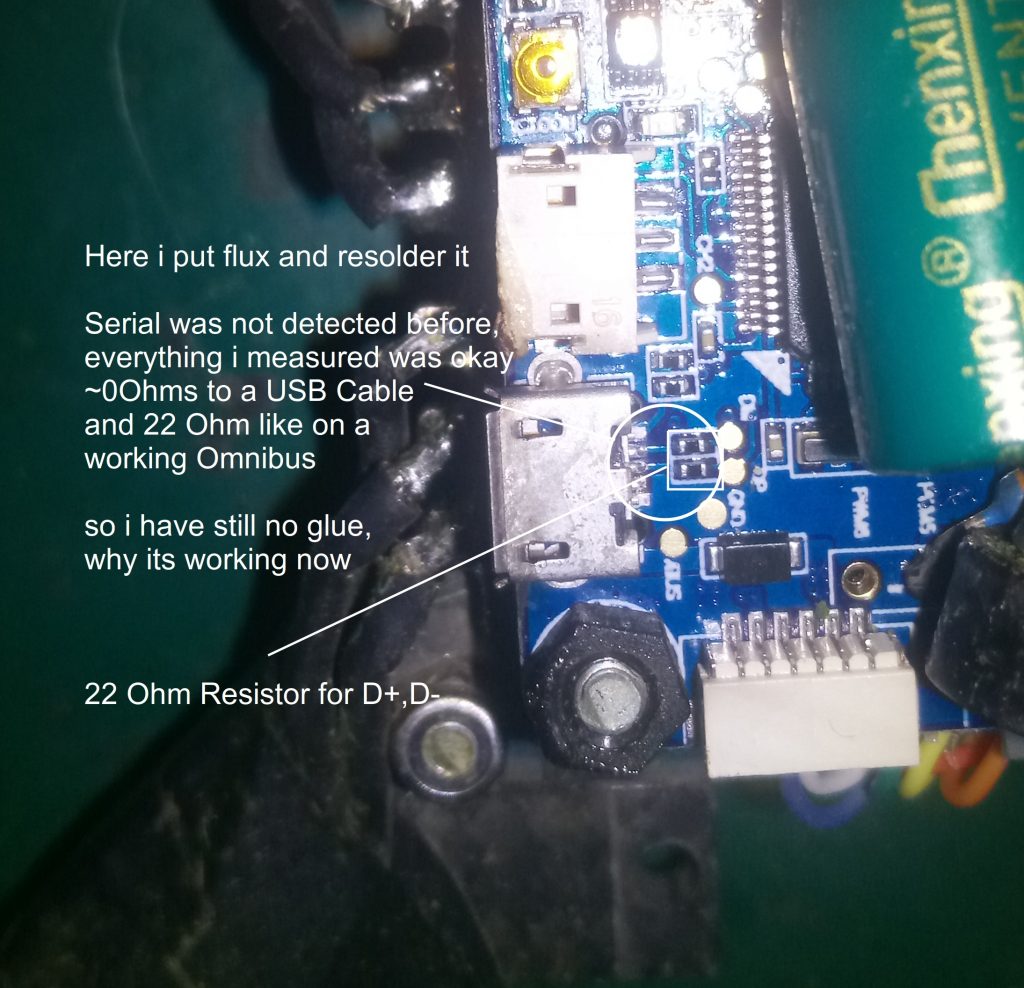
Because it worked one time i assumed its an electric issue, i measured everything, found 22 Ohm in Series at D+ and D-, strange thing was everything was the same with the working one. Strange i did not found the 1k5 pull up resistor, found out its internal on the stm32F4 (bluepill uses F3) => why the hell it does not work than? Had no idea left, so i put a lot of solderflux at the usb connector and heated with solder iron to the usb connector and the serial resistors. Connected again -> suddenly it worked out of the box. However betaflight was really slow, saw always loading screen, on laptop it work fast as it should -> found out 3d printer was using maybe nearly complete USB bandwidth.
Lessons learned: Test flight controller and usb right before you built it in and don’t use other serials while one is occupied by the 3d printer.