Found a very cool article on hackaday about using wifi to transmit video data, however without the 802.11 protocol, instead using a own digital data link, so streaming data like on analog system, however still digital only without protocol overhead acknowledges and frames and so on.
The cool thing is this stuff is open source and there exists ready to use images for the raspberry (preferred version 3)
More detailed infos under:
http://wolfgangchristl.de/dronebridge/
https://github.com/seeul8er/DroneBridge
For the first setup you need:
2x raspberry, one with camera
2x usb wlan module with packet injection support
The problem is when you buy consumer wlan sticks you can not see what you get, even if buy the same product / wifi dongle like the TP-Link TL-WN722N the next one could have a different chipset already inside. The problem is that the chipset is very important, because it depends on it if the device supports monitor/ packet injection mode or not. At the moment only the Ralink RT3070 and Atheros AR9271 are quite good supported.
To be sure you get such chipset i would recommend you usb dongles from alfa, they are used by wardrivers and you can be sure that you get always the same chipset. With the TL-WN722N from the tp-link you would get most likely the AR9271, but you can never be sure.


Be aware there exist also a old version of it (AWUS036H), without 802.11n support. It supports also monitor mode, but has a Realtek RTL8187 Chipset
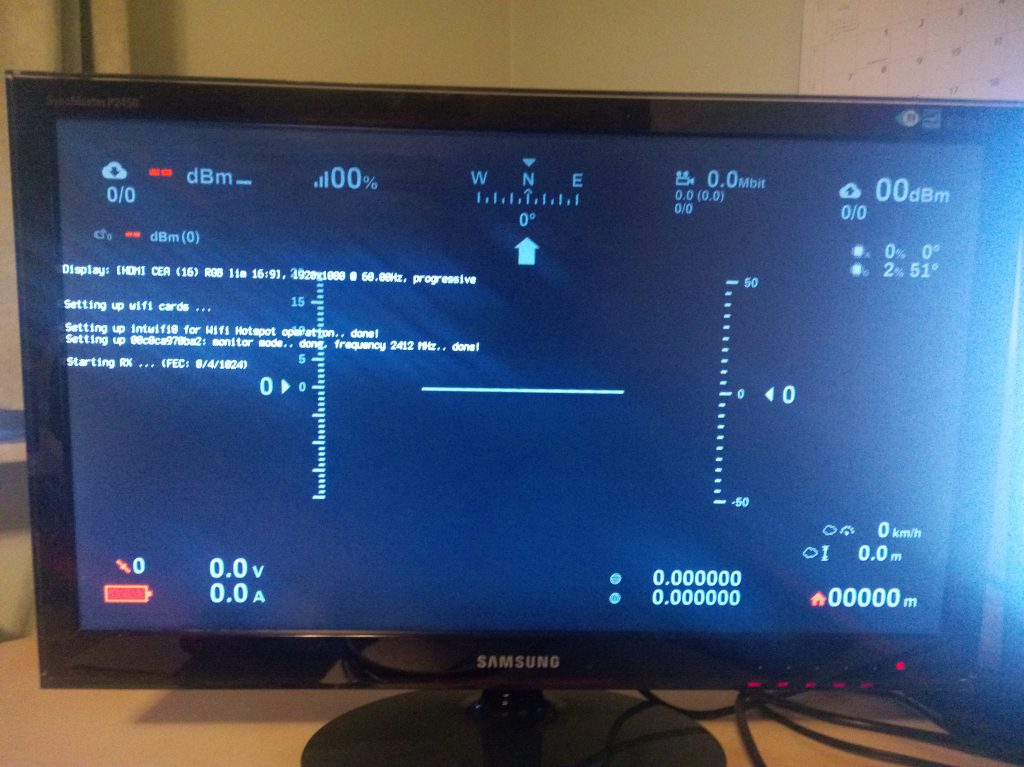
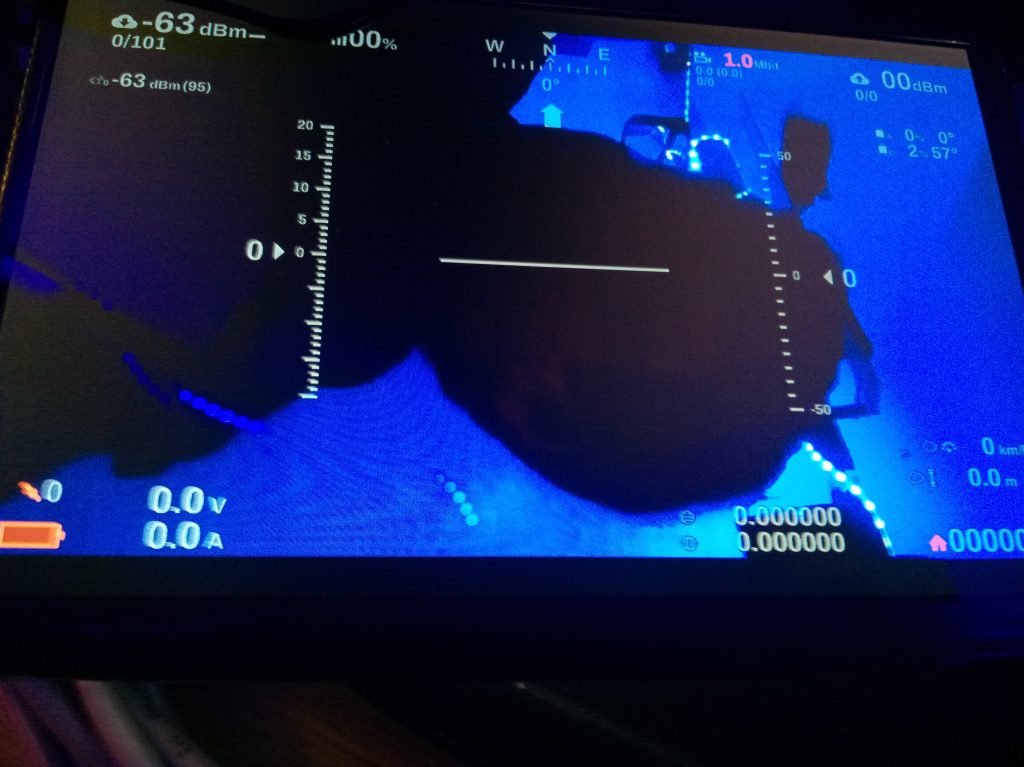
To get it runnig, connect the alfa via usb the raspberry, flash the dronebridge image and powert it. The rasperry with camera gets automatically in transmittingmode and the pi without cam in receive mode. Connect a display to the hdmi port (to the pi without cam) and you should already see the camera stream.
If you don’t get a anything maybe you have to disassemble the antenna on the receiver side, because of our test setup where transmitter and receive where very close together <1-5m we had most likely the overdrive effect.
So the next step will be a real test of the range in the wild field, hopefully winter is over soon…

















